A completely 3D printable desktop robot arm. The only required parts are three servo motors, the blue 9g type you can buy anywhere in the world, and an arduino to control them.

This project was designed as a student project. Where a group will print, construct, calibrate and program a small robot arm. The arm had to be cheap to make and require as few parts as possible - making it accessable to anyone with access to a 3D printer (typical at universities).
The arm is controlled by an arduino using MATLAB to control each joint and implement the inverse kinematics to position the pointer at a specific x-y-z location.
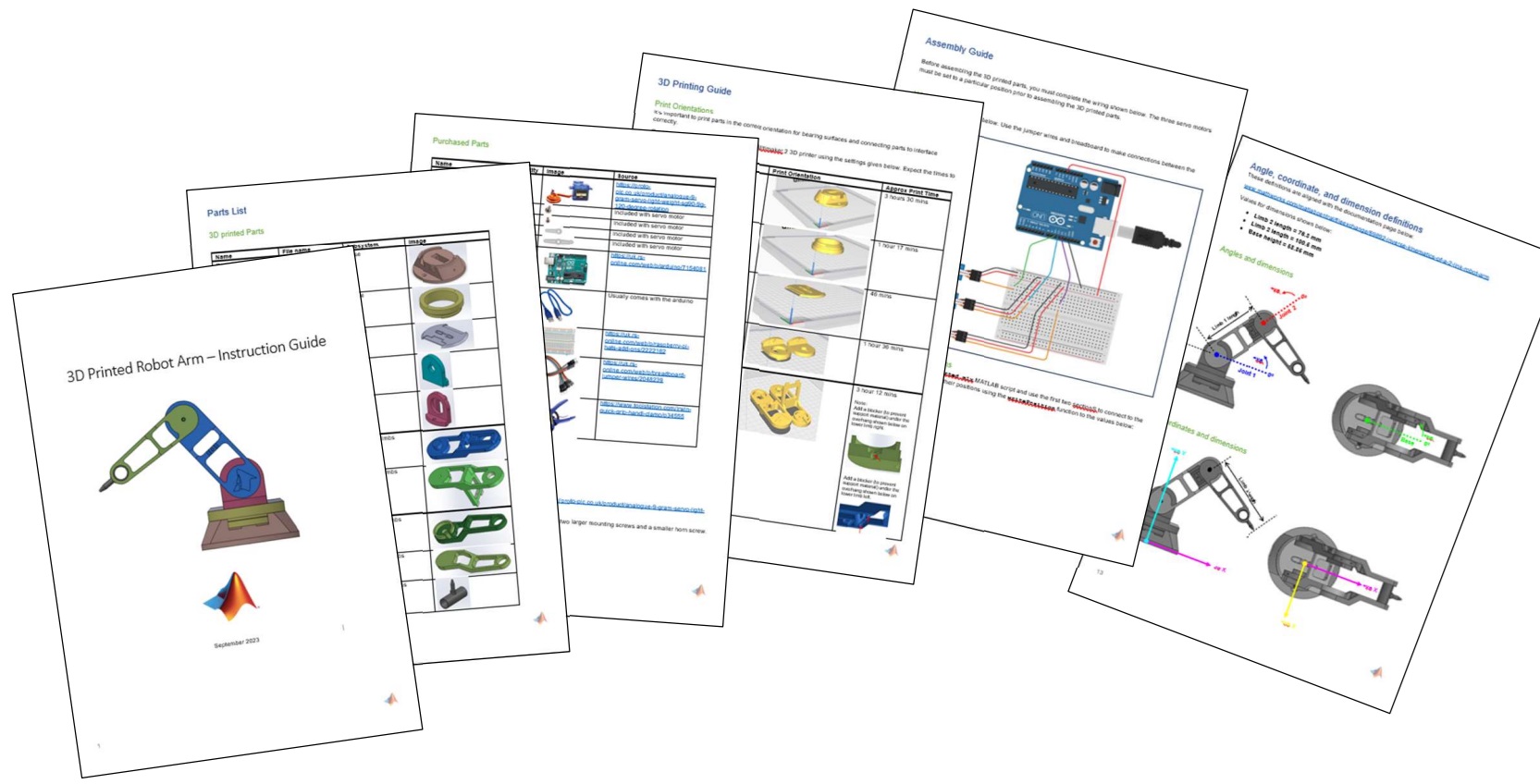
This is a public project available here where you can download everything you need to build it, including an assembly video, print instructions and a step by step guide to calibration.